MASCHINENTIERE
Roboter inspirieren Biologie
Bisher haben Ingenieure versucht, das Leben zu kopieren. Jetzt dreht sich der Spiess um, und Roboter helfen dabei, die Funktionsweise von Lebewesen zu verstehen.
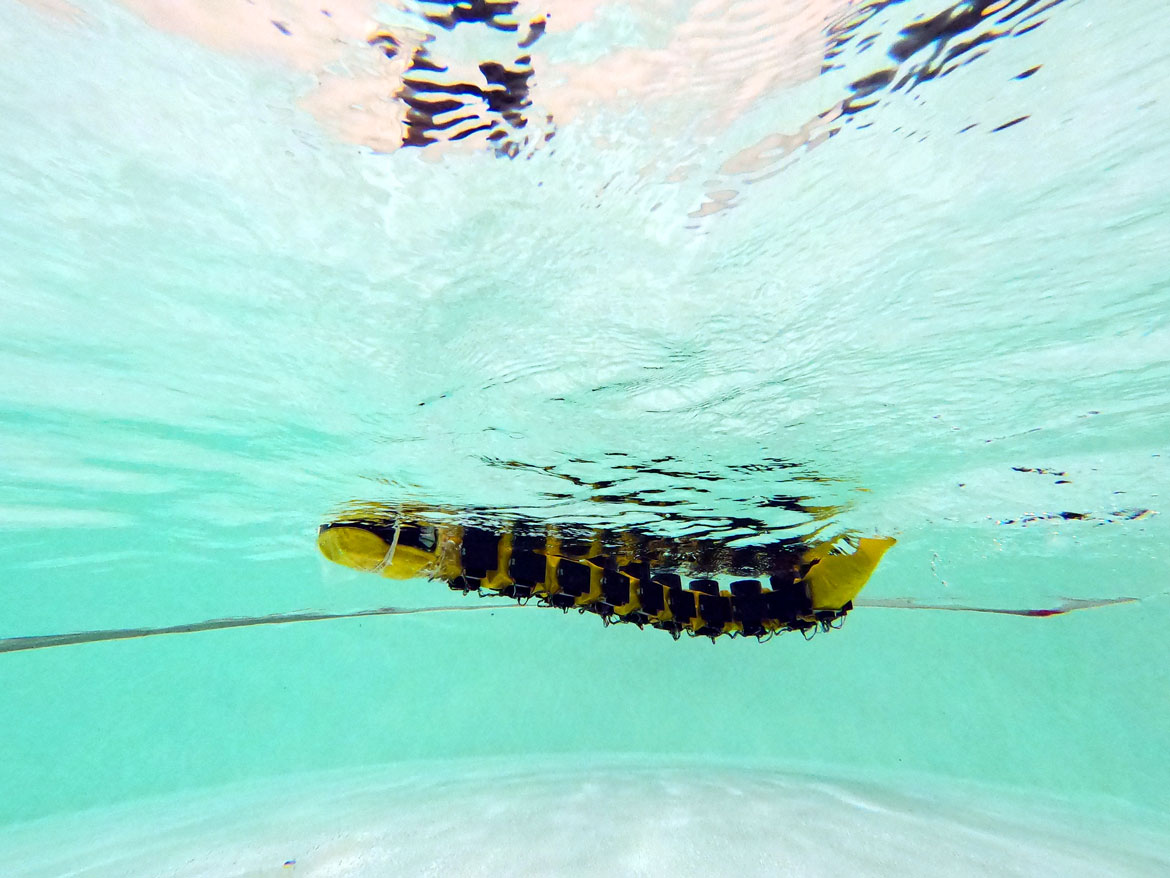
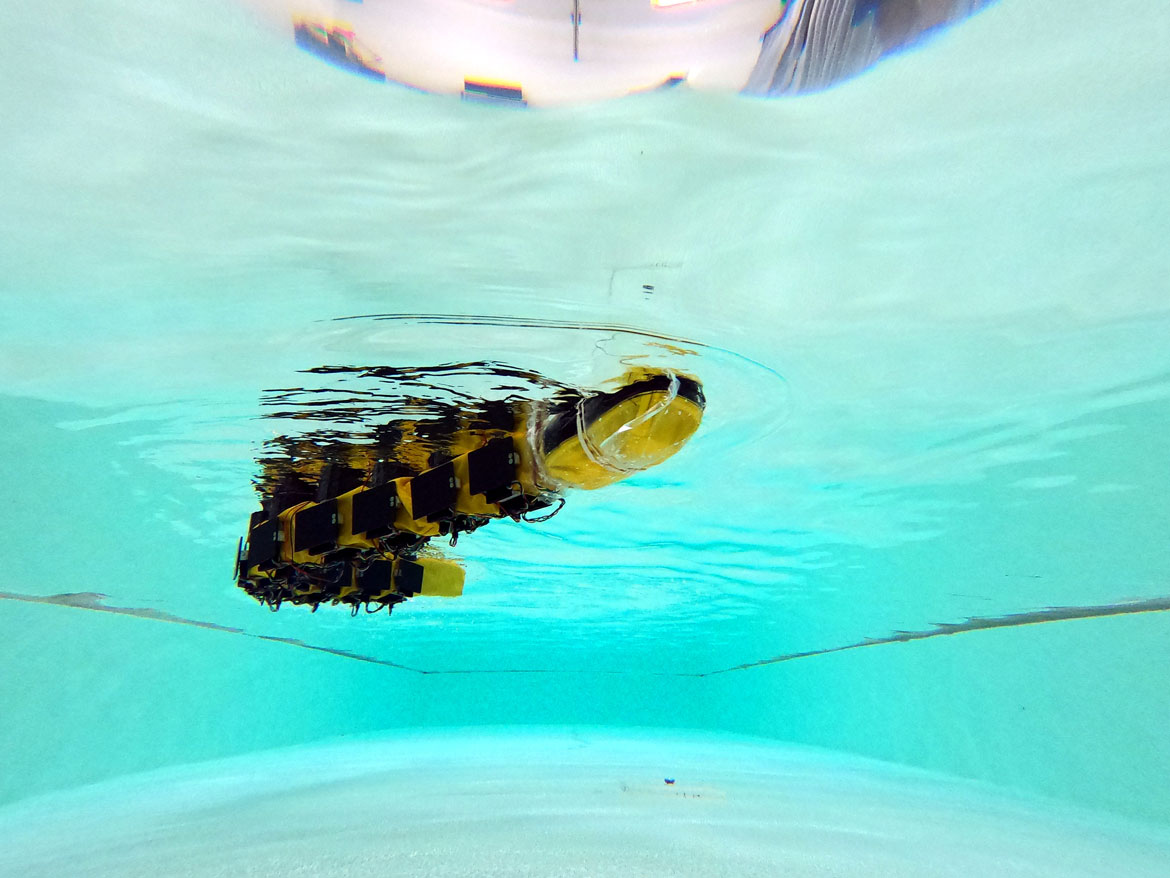
Neunaugen können sich selbst mit durchtrennter Wirbelsäule bewegen. Der Roboter zeigt, wie das geht. | Fotos: AgnathaX
Küken, Bussarde, Neunaugen, Küchenschaben – allesamt in Roboterform: Ein wachsendes Bestiarium künstlicher Kreaturen bevölkert die Labors. Meist ahmen die bioinspirierten Roboter Tricks der Natur mit dem Ziel nach, die Fähigkeiten von Maschinen zu verbessern. Manchmal ermöglichen zoologische Roboter nun aber im Gegenzug Erkenntnisse über die Arten, die ihnen ursprünglich als ihr Vorbild dienten.
Die Landung des Bussards nachvollziehen
Dieses Forschungsfeld wird als Artificial Life bezeichnet und entstand in den 1990er-Jahren. Dabei möchte man durch das Kopieren von Lebewesen neue Erkenntnisse über diese gewinnen. Dario Floreano, der heute das Laboratory of Intelligent Systems der EPFL leitet, ist einer der Pioniere. «Wir waren damals nur eine kleine Gemeinschaft, trugen aber grundlegend zu einer neuen Vorstellung bei, die sich in der wissenschaftlichen Welt zunehmend etabliert, nämlich dass sich Roboter als Modelle verwenden lassen, um offene Fragen der Biologie anzugehen», erinnert er sich. Mit den Fortschritten in der Miniaturisierung digitaler Werkzeuge Mitte der 2000er-Jahre begann sich diese Vision zu konkretisieren.
Im Laufe der letzten 20 Jahre hat sich dieser Ansatz in vier Bereiche aufgegliedert: Roboter tragen dazu bei, Bedingungen der Evolution in beschleunigtem Tempo nachzuvollziehen und so die Entstehung bestimmter Merkmale, zum Beispiel altruistisches Verhalten bei Insektenstaaten, besser zu verstehen. Mithilfe von Schwarmrobotik lässt sich ausserdem untersuchen, wie durch sensorische Kommunikation in einer Gruppe eine Form von kollektiver Intelligenz entsteht. Die Maschinentiere ermöglichen weiter Analysen über die Rolle der Morphologie, also des Einflusses der Körperform auf die Mechanik, wenn ein Lebewesen mit der Umwelt interagiert. Und schliesslich, im Fall der neuronalen Robotik, lassen sich mit ihnen Hypothesen über die Funktionsweise des Gehirns prüfen.
Eine neue Arbeit in Floreanos Labor geht von der klassischen Frage über die Leistungsfähigkeit von Drohnen aus: Warum ist es so schwierig, gleichzeitig Ausdauer und Beweglichkeit zu optimieren? Vögel beherrschen beides in beeindruckendem Mass. Von dieser Leistung der Natur wollte sich der Robotiker inspirieren lassen. Er ging auf Informationssuche und stellte fest, dass es nur sehr wenig Wissen darüber gibt, wie Vögel ihre Flügel steuern.
Schliesslich wandte er sich an den englischen Zoologen Graham Taylor, einen der wenigen Spezialisten auf diesem Gebiet, der bei der Beobachtung des Anflugs eines dressierten Bussards gerade eine innovative Hypothese aufgestellt hatte. «Bisher war man davon ausgegangen, dass Vögel beim Landen die Dauer des Bremsmanövers minimieren. Taylors Beobachtungen zufolge minimieren sie jedoch die Zeit, in der sie sich in abgewinkelter Flugposition befinden, was zum Landen notwendig ist, wodurch sie aber mehr den Windböen ausgesetzt sind», erklärt Floreano. «Mit einem Flugroboter, einem Algorithmus und einem Windtunnel konnten wir diese Hypothese testen und bestätigen – sowie beschreiben, wie die Vögel bei diesem Manöver die Form ihrer Flügel und ihres Schwanzes verändern.»
Undercover im Reich der Tiere
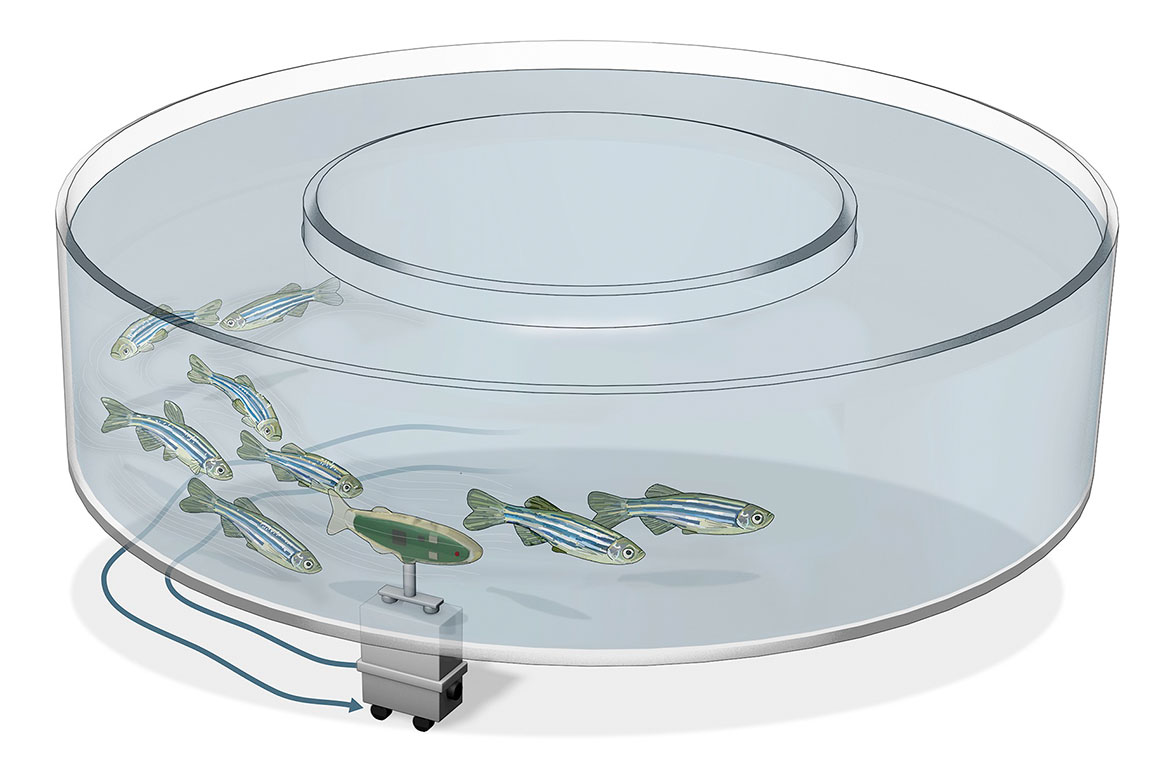
Roboter konstruieren, die sich unauffällig unter lebende Tiere mischen und damit das Verhalten in der Gruppe beobachten: Dafür hat Francesco Mondada, Leiter der Mobile Robotic Systems Group an der EPFL, seine Arbeit als Robotiker auf den Bereich der Biologie augeweitet. «Wenn man in Erfahrung bringen will, wie Fische miteinander interagieren, kann man natürlich Sensoren anbringen», sagt er. «Viel interessanter ist es aber, die Gruppe mit einem Individuum zu infiltrieren, über das man die Kontrolle hat, und so die kollektiven Entscheidungen mitzubestimmen.»
Sein erstes Projekt in diesem Bereich befasste sich in den frühen 2000er-Jahren mit Küchenschaben. «Dank dieser Arbeit konnten wir Duftstoffe und Verhaltensweisen identifizieren, mit denen sich diese Insekten verständigen», erklärt er. 2006 folgte das Roboterhuhn, das sich in eine Gruppe von Küken einfügt und Aufschluss über Aspekte ihrer kollektiven Interaktionen gibt. Der Mini-Fischroboter schwimmt seit 2013 mit Zebrabärblingen. Diese kleine Fischart bot sich an, weil schon viel über ihre soziale Kommunikation bekannt ist und die Fischroboter das Verhalten nachahmen können. In diesem Projekt mit Beteiligung des französischen Biologen Guy Théraulaz, eines Spezialisten für kollektive Intelligenz von Tieren, werden aus der Beobachtung lebender Fische entwickelte Verhaltensmodelle getestet und experimentell bestätigt.
Ich bewege mich, also bin ich
Noch in Entwicklung beim Robotiker ist ein Bienenprojekt. «Die Küchenschaben wurden unter Bedingungen im Labor gehalten, die sich erheblich von ihrem üblichen Lebensraum unterscheiden, die Fische in einer sehr dünnen Wasserschicht, da ihre Bewegungen sonst nicht modelliert werden konnten», erklärt er. «Bienen möchten wir in unserem Projekt in ihrer normalen Umgebung besuchen. Doch statt einfach einen Roboter in den Bienenstock zu schieben, simulieren wir künstliche Insekten, indem wir die natürliche Kommunikation mit Vibrationen und Wärme imitieren, bis hin zum berühmten Bienentanz, den wir beeinflussen können, indem wir die Art und Weise variieren, mit der sich Bienen untereinander für die Nahrungssuche rekrutieren.» Das Projekt wurde gemeinsam mit der Arbeitsgruppe Bienenbiologie und Verhalten der Universität Graz durchgeführt und half auch dabei, besser zu verstehen, wie sich Bienen zur sogenannten Wintertraube zusammenfinden, durch die sie kalte Temperaturen überstehen können.
«Die Fähigkeit, uns zu bewegen, ist ein wesentlicher Aspekt dessen, wer wir sind: Die Entwicklung unserer neuronalen Netzwerke ist evolutionär mit der Entwicklung der Fortbewegung verbunden.» Diese Verbindung zwischen Bewegung und Kognition ist einer der Gründe, weshalb sich Auke Ijspeert, Leiter des Biorobotik-Labors der EPFL, seit 30 Jahren für die Fortbewegung von Tieren interessiert. Er modelliert die Bewegungen und bildet sie mit Robotern nach – vom Aal über Vögel und Säugetiere bis zum Menschen. «Wirbeltiere haben sehr unterschiedliche Fortbewegungsarten, aber die neuronalen Netzwerke, die diese steuern, sind erstaunlich ähnlich», erzählt er.
Seine bevorzugte Art für diese Erkundungen ist das Neunauge, ein schuppenloser Fisch mit einem schlauchartigen Körper, der eine erstaunliche Fähigkeit besitzt: «Wenn das Rückenmark durchtrennt wird, schwimmt das Neunauge weiter, während die meisten Wirbeltiere nach einer solchen Verletzung gelähmt sind.» Weil die Robotik Experimente ermöglicht, «die an lebenden Tieren aus ethischen oder praktischen Gründen schwer durchführbar sind», lässt sich dieses Phänomen untersuchen, wobei im Modell die einzelnen Komponenten der Fortbewegung gezielt aktiviert und deaktiviert werden können. «So konnten wir zeigen, dass das sensorische Feedback der Berührungssensoren auf der Haut für die Koordination der Schwimmbewegungen ausreicht, selbst wenn die Verbindungen zwischen den neuronalen Netzen unterbrochen werden», bemerkt der Robotiker. Übertragen auf den menschlichen Körper könnten diese Ergebnisse zu medizinischen Techniken beitragen, bei denen Bewegungsabläufe durch elektrische Stimulationen des Rückenmarks reaktiviert werden.
Die Forschungsbereiche von Artificial Life eröffnen vielfältige Perspektiven. Francesco Mondada schweben Systeme vor, in denen Lebewesen und Technologie für eine empfindliche Umweltüberwachung interagieren, wobei beispielsweise Signale von Bienen eine Verschmutzung frühzeitig erkennen lassen. Auke Ijspeert ist überzeugt, dass die Modellierung von Tierbewegungen durch physische Roboter oder digitale Simulationen den Neurowissenschaften neue Impulse verleihen kann, indem sie Zusammenhänge zwischen neuronalen Netzwerken und mechanischen Eigenschaften der Lebewesen aufzeigen. «Ausserdem wird diese Forschung als Nebenprodukt wissenschaftliche Erkenntnisse und Innovationen im Ingenieurwesen hervorbringen», hofft Dario Floreano. Es scheint sich eine positive Rückkopplung abzuzeichnen – zwischen einer bioinspirierten Robotik und einer roboterinspirierten Biologie.